
智能行車抓渣系統(tǒng)HT-HCZZ500
智能行車抓渣系統(tǒng)HT-HCZZ500

系統(tǒng)特點(diǎn)
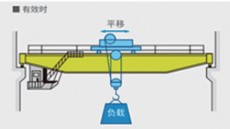
1、防搖技術(shù)與定位系統(tǒng)結(jié)合
防搖和定位相結(jié)合的技術(shù),可以完美解決單獨(dú)采用防搖技術(shù)或定位技術(shù)帶來(lái)的困擾。在定位啟動(dòng)過程中,防搖介入控制以保證在啟動(dòng)過程到高速運(yùn)行過程中抓斗不發(fā)生搖晃,在進(jìn)入減速區(qū)(接近目標(biāo)位置)后,防搖功能同樣可保證抓斗不發(fā)生搖晃,行車會(huì)以一個(gè)較低的速度、高效的完成定位工作。
2、沖渣池水渣高度識(shí)別
傳統(tǒng)的抓渣行車,司機(jī)在抓渣操作時(shí),通常會(huì)遇到因?yàn)槌刂杏兴鵁o(wú)法判斷池中渣土具體高度的情況。智能抓渣系統(tǒng)利用PLC及抓斗實(shí)際操作時(shí)的重量,可判斷某一位置渣土的實(shí)際高度及該位置的渣土是否已經(jīng)抓完。
3、意外情況下系統(tǒng)保護(hù)
智能抓渣行車系統(tǒng)內(nèi)部本身具有具備起重專用的制動(dòng)時(shí)序,當(dāng)編碼器信號(hào)丟失或者超出設(shè)定范圍后,變頻器立即輸出強(qiáng)制抱閘信號(hào),確保提升過程的安全和不下溜,能夠滿足起重提升的工藝要求,不會(huì)出現(xiàn)抓斗失控滑落導(dǎo)致撕扯皮帶的可能。
4、設(shè)備預(yù)警系統(tǒng)
重要設(shè)備工作運(yùn)行中,系統(tǒng)通過20個(gè)維度對(duì)重要設(shè)備及傳感器參數(shù)進(jìn)行監(jiān)控與分析,提前告知設(shè)備運(yùn)行壽命及故障狀況。
5、智能抓渣與地面操控抓渣一鍵切換自由操控。
智能模式、半自動(dòng)模式、人工駕駛模式和遙控模式等。
擊刷新驗(yàn)證碼")
| 

關(guān)注我們 |
Copyright ? 青島恒拓環(huán)保科技有限公司 版權(quán)所有